 Studies in Informatics and Control – ICI Bucharest
Studies in Informatics and Control – ICI Bucharest
On Using Passive RFID Tags to Control Robots for Path Following
Ioan SUSNEA, Grigore VASILIU
Dunărea de Jos University of Galaţi, Romania
111, Domneasca Street, Galaţi, 800201, Romania
ioan.susnea@ugal.com, vasiliugrigore3@yahoo.com
Abstract: Although very few robots actually go to Mars, we continue to design these machines as if they were organisms operating in a totally unknown and hostile environment. In fact, in most situations, the environment is not only predictable, but it can also be manipulated so that the missions of the autonomous robot may be supported, by including sensors, actuators, computing and communication equipment. One of the most convenient ways to manipulate the environment is to deploy a number of RFID devices, capable of storing a variety of digital data, aimed to provide autonomous robots with valuable navigation information. As a result, the on-board equipment can be significantly reduced, along with the power requirements, and the overall cost of the robots. While the vast majority of the applications of the RFID technology for robot control are related to robot localization and mapping, this paper presents an experiment aimed to demonstrate the possibility of using RFID tags for path following.
Keywords: RFID, real time robot control, path following, embedded devices.
>>Full text
CITE THIS PAPER AS:
Ioan SUSNEA, Grigore VASILIU, On Using Passive RFID Tags to Control Robots for Path Following, Studies in Informatics and Control, ISSN 1220-1766, vol. 20 (2), pp. 157-162, 2011. https://doi.org/10.24846/v20i2y201108
1. Introduction
RFID and Robot Control
A RFID (Radio Frequency Identification) system ([1]) typically consists in a reader, equipped with an antenna, and at least one “RFID tag”, which is a small ROM/EEPROM memory, and additional circuits for providing power and access to the digital data stored in the tag (see Figure 1).
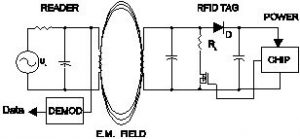
Figure 1. A typycal, passive RFID system
Most RFID tags are passive, i.e. they draw power from the electromagnetic field generated by the reader’s antenna.
This is one of their major advantages- the other is the very low cost.
The actual data transfer between the reader and the tag is based on “load modulation”, obtained by connecting a variable load to the resonant circuit of the receiver’s antenna. The resulting amplitude modulation (A.S.K. – Amplitude Shift Key) can be sensed and decoded by the reader.
Depending on the maximum range where data transfer between reader and tags is possible, RFID devices are called:
- proximity tags (operating range between 0 and 100mm)
- vicinity tags (operating range between 100 mm and 1000 mm)
- long range tags (operating range between 1 m and 15 m. These are usually active – they have their own power supply, and are much more expensive).
Typical data storage capacity of the low cost tags range from a few bytes of ROM, to a few kilobytes of EEPROM.
The A.S.K data transfer is collision prone, i.e. if more than one tag is in the recognition area of the reader, as shown in Figure 2, a data collision will occur, and none of the tags will be read.
 Figure 2. A placement of tags with more than one tag in the recognition area of the reader may lead to data collision.
Figure 2. A placement of tags with more than one tag in the recognition area of the reader may lead to data collision.
The solution is to adjust the tag density and the distance between the reader’s antenna and the tags, so that only one tag is in the recognition area, like in Figure 3, or to use a modern reader, having collision avoidance capabilities. Even in this last case, tags are read one by one, in sequence.
 Figure 3. Placement of tags for collision-free data transfer
Figure 3. Placement of tags for collision-free data transfer
This aspect is essential for understanding the applicability and the limitations of using RFID tags in robot navigation. If, for example, a tag distribution as depicted in figure 3 is used for robot localization, with the reader carried by the mobile robot, and the tags embedded in the floor, store the absolute coordinates (x,y) of their location, the positionning error will be comparable to the radius of the recognition area, and there is no direct means to determine the robot orientation, based on the information stored by the tags.
On the other hand, since the robot can access only one tag at a time, the possibility to define paths, as sequences of points, defined by information stored in different tags, seems, at a first glance, very limited.
This is the reason why the majority of the literature on this topic focuses on the problem of using RFID for robot localization.
This paper presents two possible solutions to the problem of defining and following paths for real time control of mobile robots, by means of passive RFID tags deployed in the environment.
Besides this introduction this work is structured as follows:
Section 2 is a brief overview of the RFID based solutions for robot control.
Section 3 presents the general issues related to defining and following paths by means of RFID tags, and suggests one possible solution.
Section 4 presents a new method for defining paths in a RFID augmented environment, and the experimental results obtained. We called this method “the riverbed model”.
Finally, section 5 is reserved for discussion and conclusions.
REFERENCES:
- FINKENZELLER K, RFID Handbook, Second Edition, John Willey and Sons, 2003.
- CARDULLO et al. Transponder Apparatus and System, U.S. Patent 3,713,148, 1973.
- HAEHNEL, D., M. PHILIPOSE et al., Mapping and Localization with RFID Technology, in Robotics and Automation, 2004. Proceedings. ICRA ’04. 2004 IEEE International Conference on, vol. 1, 2004, pp. 1015-1020.
- KULYUKIN, V., C. GHARPURE, J. NICHOLSON, S. PAVITHRAN, RFID in Robot-Assisted Indoor Navigation for the Visually Impaired, Intelligent Robots and Systems, 2004. (IROS 2004). Proceedings,. 2004 IEEE/RSJ International Conference on vol. 2, Issue 28 Sept.-2 Oct. 2004, pp. 1979-1984.
- KULYUKIN, V., A. KUTIYANAWALA, M. JIANG, Surface-embedded Passive RF Exteroception: Kepler, Greed, and Buffon’s Needle, in Ubiquitous Intelligence and Computing, Springer, 2007, pp. 33-42.
- PARK, S., S. HASHIMOTO, Indoor localization for autonomous mobile robot based on passive RFID, Proceedings of the 2008 IEEE International Conference on Robotics and Biomimetics Bangkok, Thailand, February 21-26, 2009.
- KOUTSOU, A. D., F. SECO, A. R. JIMENEZ, J. O. ROA, J. L. EALO, C. PRIETO, J. GUEVARA, Preliminary Localization Results With An RFID Based Indoor Guiding System, in IEEE International Symposium on Intelligent Signal Processing Alcala de Henares, Spain, October, 2007.
- ZHANG, Y., M. G. AMIN, S. KAUSHIK, Localization and Tracking of Passive RFID Tags Based on Direction Estimation, International Journal of Antennas and Propagation, 2007
- BYOUNG-SUK, C., L. JOON-WOO, L. JU-JANG, Localization and Map-building of Mobile Robot Based on RFID Sensor Fusion System, in IEEE International Conference on Industrial Informatics, Daejeon Korea, INDIN 2008.
- LIM HYUNG, S., C. BYOUNG SUK, L. JANG MYUNG, An Efficient Localization Algorithm for Mobile Robots based on RFID System, SICE-ICASE International Joint Conference 2006 Bexco, Busan, Korea.
- MAMEI, M., F. ZAMBONELLI, Physical Deployment of Digital Pheromones through RFID Technology, Proceedings of Swarm Intelligence Symposium, SIS 2005.
- SUSNEA, I., G. VASILIU, A. FILIPESCU, RFID Digital Pheromones for Generating Stigmergic Behaviour to Autonomous Mobile Robots, 4th WSEAS Int. Conf. on Dynamic Systems and Control (Control ’08), CORFU ISLAND, GREECE, October 26-28, 2008, pp. 20-24.
- MORALES, J., J. L. MARTINEZ, M. A. MARTINEZ, A. MANDOW, Pure-Pursuit Reactive Path Tracking for Nonholonomic Mobile Robots with a 2D Laser Scanner, EURASIP Journal on Advances ?n Signal Processing Volume, 2009.
- BARTON, M. J., Controller Development and Implementation for Path Planning and Following in an Autonomous Urban Vehicle, Undergraduate thesis, University of Sydney, 2001.
- SUSNEA, I, G. VASILIU, A. FILIPESCU, Real-Time, Embedded Fuzzy Control of the Pioneer3-DX Robot for Path Following, Proceedings of 12th WSEAS International Conference on SYSTEMS, Heraklion, Greece, July 22-24, 2008, pp. 334-338.
- SUSNEA, I.; A. FILIPESCU, G. VASILIU, G. COMAN, A. RADASCHIN, The Bubble Rebound Obstacle Avoidance Algorithm for Mobile Robots, ICCA 2010, The 8th International Conference on Control and Automation, Xiamen, China, 9-11 June, 2010, pp. 540-545.